چاپ سهبعدی: انقلابی در تولید ارتزهای مقیاسپذیر مچدست
تولید مستقیم مقیاسپذیر یک ارتز چندمنظوره و کاربردی مچ-دست با استفاده از چاپ سهبعدی
آسیب نخاعی (SCI) یکی از ناتوانکنندهترین آسیبها است که درمان مستقیمی ندارد. بنابراین، مدیریت SCI به یک وظیفه حیاتی برای مراقبان و بهویژه بیماران تبدیل میشود، زیرا زندگی آنها هم از نظر جسمی و هم از نظر روانی بهشدت تحت تأثیر قرار میگیرد. آسیب در بخشهای مختلف ستون فقرات منجر به از دست دادن جزئی یا کامل عملکرد حرکتی در یک یا چند قسمت از بدن میشود. رویکردهای کنونی توانبخشی بر تثبیت مؤثر همراه با یک برنامه توانبخشی مستمر تأکید دارند.
این پژوهش بر توسعه یک ارتز نوآورانه مچ-دست با استفاده از چاپ سهبعدی متمرکز شده است تا به بیماران مبتلا به آسیب نخاعی در سطوح C5-C7 کمک کند؛ آسیبی که موجب از دست دادن عملکرد حرکتی در انتهای دیستال اندام فوقانی میشود. یک چارچوب توسعهیافته بهینه ارائه شد تا تولید سریع، مقیاسپذیری، ارگونومی و حداقل فرآیندهای پسپردازش را برای ساخت یک دستگاه ارتوتیک فوقالعاده کمهزینه (∼2 دلار) تضمین کند.
روش “چاپ در جای خود” (Print in Place – PIP) بهکار گرفته شد تا تمامی مراحل پسپردازش و مونتاژ را حذف کند. یک مکانیزم منحصر به فرد برای بریس انعطافپذیر مچ دست معرفی شد. دستگاه کمکی توسعهیافته ابتدا از طریق تحلیل اجزای محدود (FEA) ارزیابی شد و سپس پس از ساخت، بهصورت تجربی تأیید گردید. در مجموع، این دستگاه توانست بارهای طراحیشده را با موفقیت تحمل کند. انتظار میرود که استفاده از این روشها و تکنیکها بهطور چشمگیری مقیاسپذیری و مقرونبهصرفه بودن دستگاههای ارتوتیک چاپ سهبعدی را افزایش دهد، بهویژه در کشورهای کمدرآمد و با درآمد متوسط که در آنها موارد SCI نه تنها بسیار شایع هستند بلکه مورد غفلت نیز قرار میگیرند و این امر شدت آسیب را افزایش میدهد.
مواد و روشها
ارتز چندمنظوره مچ-دست برای حرکات سوپینیشن-پرونیشن با رعایت اصول طراحی برای ساخت (DFM) و با استفاده از روش مدلسازی رسوبی گداختی (FDM) در چاپ سهبعدی طراحی شد. علاوه بر این، یکی از ویژگیهای کلیدی این دستگاه کمکی آن بود که در یک مرحله چاپ و با استفاده از روش “چاپ در جای خود” (Print in Place – PIP) تولید شد. در این روش، کل مجموعه بهصورت یکپارچه چاپ میشود و تمامی روابط سینماتیکی بین اجزای مختلف آن حفظ میگردد.
طراحی
دادههای آنتروپومتریک دست و ساعد از منابع متعدد، از جمله یک مدل بازوی اسکن سهبعدیشده و مقالات علمی گزارششده جمعآوری شد. سپس ارتز مچ-دست بر اساس مدل بازوی اسکنشده سهبعدی طراحی شد، درحالیکه ابعاد آنتروپومتریک میانگین نیز در نظر گرفته شد.
این ارتز با استفاده از نرمافزار SolidWorks 2023 (Dassault Systèmes, France) مدلسازی شد و مادهی مورد استفاده پلیلاکتیک اسید (PLA+) (Esun Industrial Co., Ltd., Shenzhen, China) بود .
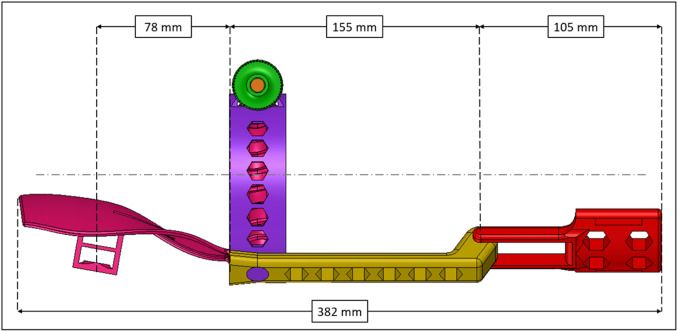
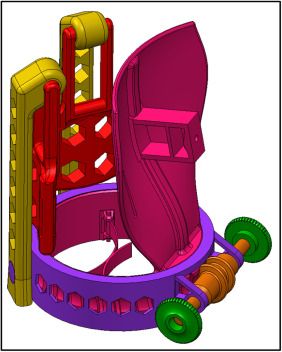
شکل 1 ارتز مچ-دست توسعهیافته را نشان میدهد و شکل 2 ابعاد کلی این دستگاه کمکی را نمایش میدهد. درحالیکه عملکرد کلی و فرم عمومی از مدل قبلی ارتز مچ-دست چندمنظوره الهام گرفته شده بود، بهینهسازیهای قابلتوجهی در طراحی و فرآیند ساخت انجام شد که بر قابلیت مقیاسپذیری محصول، زمان و هزینهی تولید، و ارگونومی تمرکز داشتند.

استراحتگاه کف دست پهنتر و سادهتر شد تا از یک سطح خمیده و یکنواخت برای راحتی و ارگونومی بهتر تشکیل شود. علاوه بر این، یک طراحی دوسویه (ambidextrous) اتخاذ شد تا برای هر دو دست راست و چپ مناسب باشد، قابلیتی که در نسخه قبلی وجود نداشت.
نمای مقطعی استراحتگاه کف دست به طور قابلتوجهی نازکتر شد و یک ریب تقویتی در قسمت زیرین، به صورت طولی در امتداد مرکز، اضافه شد تا کاهش سفتی ناشی از کاهش ضخامت جبران شود. همچنین، یک شیار همراه با یک پیچ تنظیم در سطح زیرین استراحتگاه کف دست تعبیه شد تا امکان اتصال ابزارهای مختلف موردنیاز برای انجام فعالیتهای روزمره (ADL) فراهم شود.
برای تولید حرکات سوپینیشن و پرونیشن مچ، یک چرخدنده حلزونی خودقفلشونده به کار گرفته شد . در این طراحی، چرخدنده حلزونی و دستگیرههای چرخان مچ در یک قطعه ادغام شدند. مکانیزم دوقسمتی یاتاقان از طراحی قبلی حذف و با تکیهگاههای لغزشی بهینهشده جایگزین شد که از دو انتهای چرخدنده حلزونی پشتیبانی میکنند.
تعداد دورهای چرخدنده حلزونی از پنج دور به دو دور کاهش یافت که منجر به بهینهسازی بیشتر طراحی و ساخت شد. همانطور که در شکل 2 نشان داده شده است، شکافهای ششضلعی در محیط محفظه چرخدنده حلزونی، اتصال ساعد و بریس ساعد تعبیه شد تا جرم ارتز کاهش یابد. قطر داخلی چرخدنده حلزونی 93 میلیمتر در نظر گرفته شد تا استفاده از ارتز (donning) راحتتر شود.
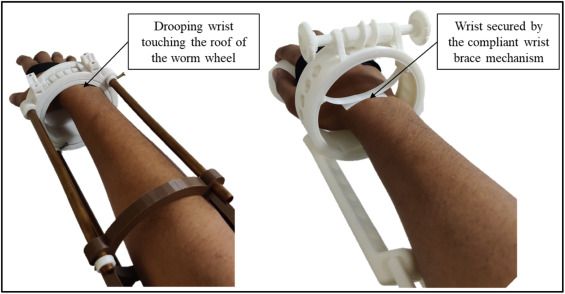
ارتز در دو نقطه به بازو متصل شد: یکی در کف دست و دیگری در عضله دوسر بازویی (bicep). با این حال، اتصال تنها در دو نقطه باعث افتادگی مچ بیحرکت و برخورد آن با بالای حفره چرخدنده حلزونی میشد که برای بیمار ناراحتی ایجاد میکرد.
برای حل این مشکل، یک مکانیزم بریس انعطافپذیر برای مچ دست طراحی شد که در شکل 1 و شکل 3 نمایش داده شده است. این مکانیزم تراز مناسب بین مچ و بازو را حفظ میکند و در عین حال، چسبندگی ارتز را به بازوی بیمار هنگام انجام حرکات سوپینیشن-پرونیشن بهبود میبخشد.
نتیجه گیری
کار فعلی یک ارتز دستی چند منظوره مقیاس پذیر چاپ شده سه بعدی جدید را برای بیمارانی که از آسیب نخاعی رنج می برند، ارائه می دهد که به آنها در انجام فعالیت های روزمره کمک می کند. از پرینت سه بعدی FDM برای تولید یک ارتز دستی کاملاً مونتاژ شده با استفاده از تکنیک PIP استفاده شد. این طرح شامل یک مکانیسم مچ بند سازگار منحصر به فرد برای جلوگیری از افتادگی مچ دست هنگام نگه داشتن در ارتز بود. ارتز دست توسعهیافته با استفاده از تکنیکهای FEA قبل از ساخت برای کاهش خطاها و زمان توسعه ارزیابی شد. نیروهای نگهدارنده تخمینی به خوبی با میانگین نیروی نگهدارنده ارزیابی شده تجربی با استفاده از حسگر FSR مطابقت داشت. فرآیندهای طراحی و ساخت مشخص شده درگیر میتواند به طور بالقوه به کاهش هزینه دستگاههای ارتز کمکی مشابه، افزایش قیمت و دسترسی به نیازمندان کمک کند.
Reference